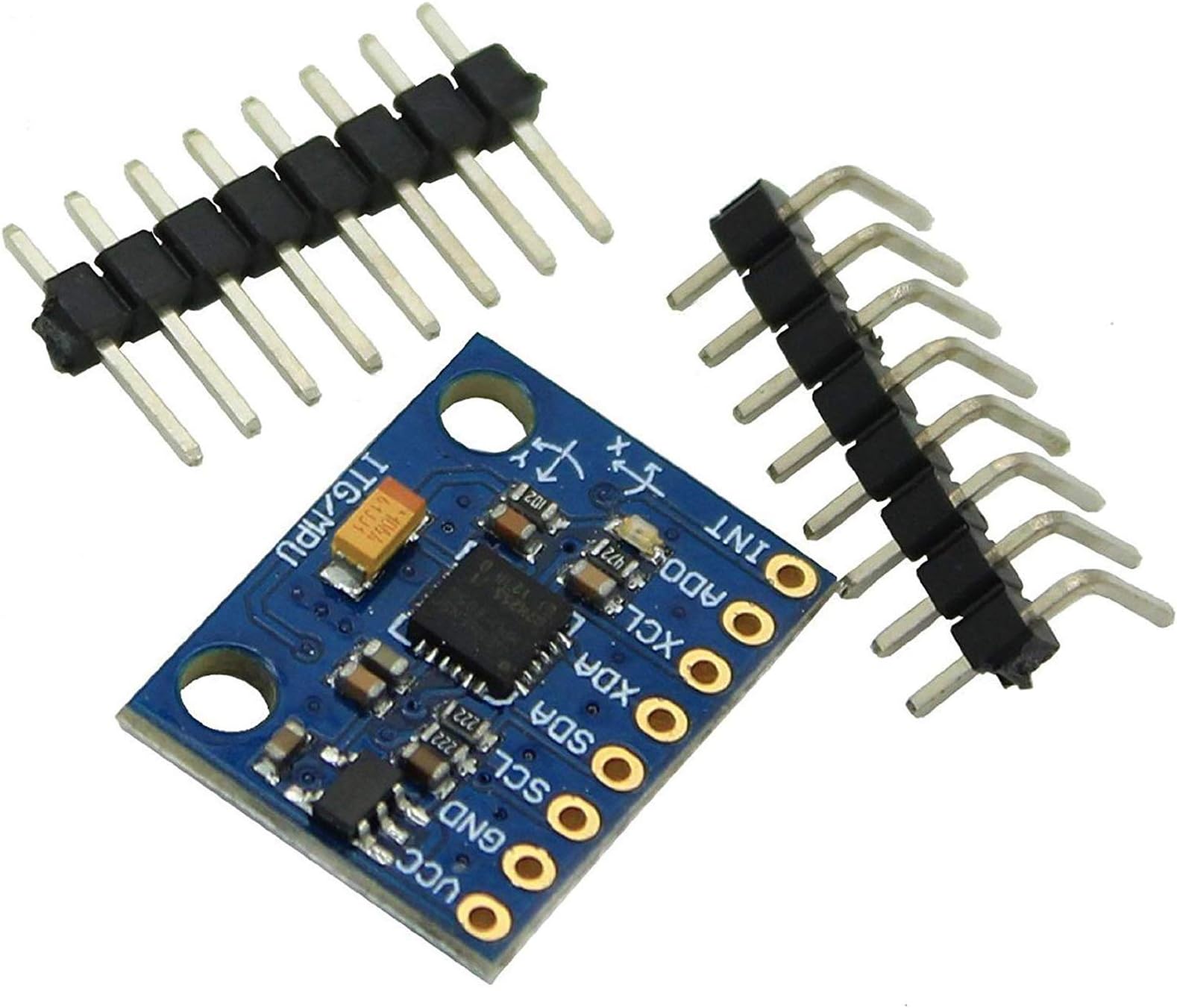
I am fairly new to Arduino projects, so this was a perfect breakout board to get my feet wet. The major down side to this product is that its difficult to find info on it (as said by other users). After finding some code, the unit seems to work pretty well... I used this board on a quadcopter to help with the inherent stability issues. Hopefully I'll save some people the time to dig up this information. Here is a link for those doing arduino projects: [...] --> See first comment on this post here's the source code for the I2C library I used: [...] --> See first comment on this post This library contains two helpful examples; one that allows the raw accelerometer and gyroscope values to be accessed, and the other calculates Euler angles, yaw pitch roll, world accelerations, and quaternions. If you using this with an arduino, make sure that the I2C library and a MPU6050 library are in the Arduino sketch folder, this will allow it to compile correctly. This was also difficult to find: The GY-521 breakout board is wired to the Arduino Mega as followed: Vcc - 3.3V GND - GND SCL - SCL (pin 21) SDA - SDA (pin 20) ADO - GND INT - D2 The GY-521 breakout board is wired to the Arduino Uno as followed: Vcc - 3.3V GND - GND SCL - D5 SDA - D4 ADO - GND INT - D2